
以自动化系过程控制工程实验室为背景,设计了基于B/S结构的虚拟实验系统。系统的总体结构,采用VRML虚拟现实建模语言进行实验设备及实验环境的三维建模,实现了实验室虚拟环境的构建;通过实验室中基于Profibus现场总线的监控系统,设计了二阶水槽系统建模数据采集实验,并利用Matlab进行建模及液位的控制仿真;通过以上工作,实现了基于VRML和Matlab/Simulink仿真计算引擎的虚拟实验系统。利用得到的数学模型和仿真模型,根据实际工程实验控制器参数整定的要求,设计了基于遗传算法的控制器参数优化方法,通过实际实验的运行,验证了优化后的PID参数对控制器参数的整定具有指导性。
实验一:单回路液位控制系统实验
一、实验目的
1.通过实验熟悉单回路反馈控制系统的组成和原理;
2.定性分析研究PID控制器参数对系统性能的影响;
3.分析对象参数对控制效果的影响;
4.分别从供水侧和出水侧施加扰动,研究PID控制器的扰动抑制能力。
二、实验设备
安装Kingview组态软件和KingACT软逻辑软件的计算机一台。
三、实验原理
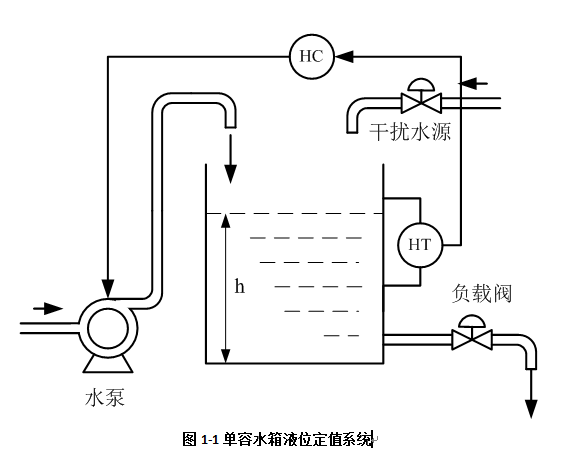
增加干扰水源相应的组态项目,干扰水源的模拟可在入水量上叠加一个较小的水量信号,并通过开关控制其是否有效。因此增加两个变量,如下表。
表 1-1 单回路水箱控制系统增加的仿真变量表
|
参数 |
变量名称 |
变量类型 |
单位 |
下限 |
上限 |
初始值 |
|
干扰水源 |
干扰水源 |
Double |
L/s |
0 |
0.01 |
0.0001 |
|
干扰水源开关 |
干扰开关 |
Bool |
False |
四、 实验方法与步骤
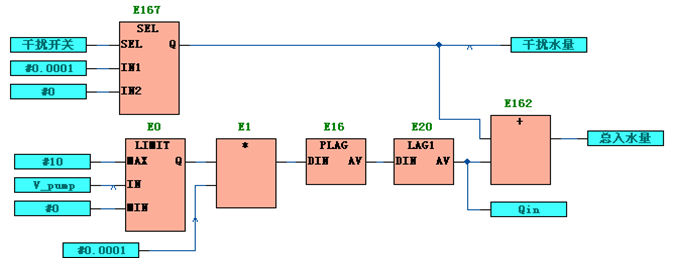
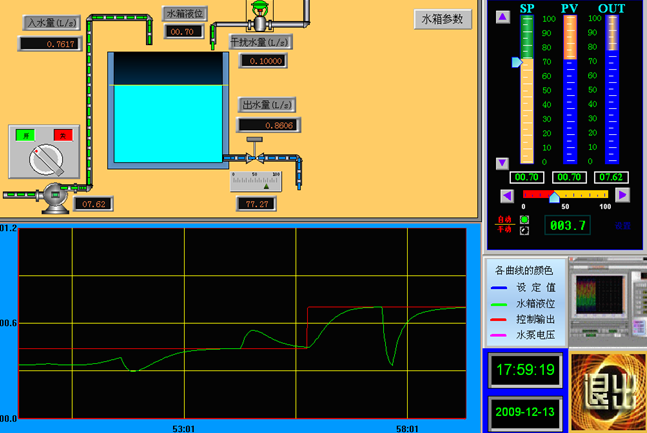
1.启动KingACT编程系统,打开“单回路水箱液位控制(干扰)”工程文件。在对象组态图中增加扰动水源组态。在原组态的基础上增加一个加法器和选择开关模块,并进行变量连接,如图所示。
2.启动组态王工程管理器,打开“单回路水箱液位控制(干扰)”工程文件,在数据词典中增加两个变量,分别为“干扰开关”和“干扰水量”,并建立与OPC服务器的通道连接。调入仿真主画面,增加干扰水源控制阀和干扰水量数值指示,分别与“干扰开关”和“干扰水量”进行动画连接,如图所示。
3.启动KingACT运行系统,装入“单回路水箱液位控制(干扰)”工程文件。
4.启动KingACT OPC服务器,装入“单回路水箱液位控制(干扰).plc”文件,并置于运行状态。
5.在组态王工程管理器中,将“单回路水箱液位控制(干扰)”切换至运行状态。
6.为调节器设置PID参数。
7.启动给水泵,调节器置于手操状态,为水泵提供一控制电压,并将出水阀置于50%开度,等待液位达到平衡状态。
8.改变水位设定值,将调节器置于自动状态,观察液位变化情况。
9.通过打开干扰阀门和改变出水阀开度,分别施加进水和出水扰动,观察液位变化情况。
10.调整PID参数,直到获得较为满意的结果。
11.通过参数设置改变水箱对象的面积,重新进行上述实验。
五、 实验报告要求
1.通过抓图拷屏的方法提交获得的实验曲线。
2.根据实验过程填写下表,并分析水箱面积变化对调节器参数的影响。
表 1-2 单回路水箱液位控制系统实验记录表
|
水箱面积 (cm2) |
比例系数 |
积分时间 (ms) |
微分时间 (ms) |
超调量 (%) |
过渡过程时间 |
3.分析PID定值调节和扰动抑制特性。
4.实验报告。
六、思考题
1.如果要增加变化的干扰水源应如何增加?